
Tracking objects in 3D with high accuracy is a core capability at Atracsys. In the medical field, optical tracking cameras such as the fusionTrack 500 (fTk500) and fusionTrack 250 (fTk250) act as the “eyes” of navigation and robotic systems by localizing surgical instruments relative to patient reference frames in demanding operating-room (OR) conditions. While optical tracking is well-established for these applications, it inherently requires an unobstructed line-of-sight between camera and fiducial markers. This constraint impacts system placement in the OR and can restrict intraoperative freedom of movement. The latter is an increasingly important factor as usability and workflow become central to clinical adoption.
In a surgical tracking setup, tools and patient reference frames are equipped with fiducial marker arrays. Different fiducial technologies exist, such as retro-reflective discs, retro-reflective spheres and active LEDs. Each comes with trade-offs, particularly regarding the maximum tilt (rotation) that can be tolerated before the line-of-sight is broken and the tool is no longer reliably detected.
At Atracsys, we have developed an omnidirectional marker array concept called forpi™. This new category of marker combines the benefits of fiducial marker tracking with increased orientation freedom in front of the camera. Unlike classical planar arrays, forpi markers distribute fiducials over a 3D geometry, enabling continuous tracking across large rotations. The key point is to avoid the usual compromise between accuracy and orientation robustness. forpi geometries are designed to prevent symmetries or ambiguities that can make pose reconstruction ill-posed, an issue that often complicates the design of classical marker arrays. Combined with the identification and reconstruction algorithms in the SDK, multiple forpi markers can be tracked simultaneously without algorithmic confusion.
The following video illustrates the full pipeline of marker tracking with a fusionTrack 500. After detection and identification in the stereo images, Atracsys’ SDK computes the 6DoF pose of each marker. The animated 3D models are not pre-defined animations: their motion is entirely driven by these reconstructed poses.
forpi is designed to support application-driven mechanical integration: the marker array can follow the tool geometry while maintaining omnidirectional visibility. This enables customization of size, shape, and fiducial distribution to match the clinical workflow and instrument constraints. The examples in Figure 1 illustrate a few possible geometries; the design space is significantly broader and can be tailored to an integrator’s requirements.

Figure 1: Examples of omnidirectional forpi™ markers.
Our approach enables dense packing of fiducial markers to sustain detection over a wide range of viewing angles. The achievable density, and thereby the miniaturization potential, is bounded by what the camera can resolve, which depends on application conditions (e.g., maximum working distance). Although forpi markers incorporate more fiducials than classical arrays, the overall form factor is not necessarily larger and can even be reduced. A higher number of fiducials can also improve pose robustness and accuracy.
In figure 2, we compare classical retro-reflective disc and sphere markers to a forpi marker. A pointer was equipped with each marker technology, a pivot calibration was performed, and the target registration error (TRE) (the residual error in localizing the pointer tip) was measured while rotating the pointer. The forpi marker provides continuous 360° detection while maintaining high reconstruction accuracy.
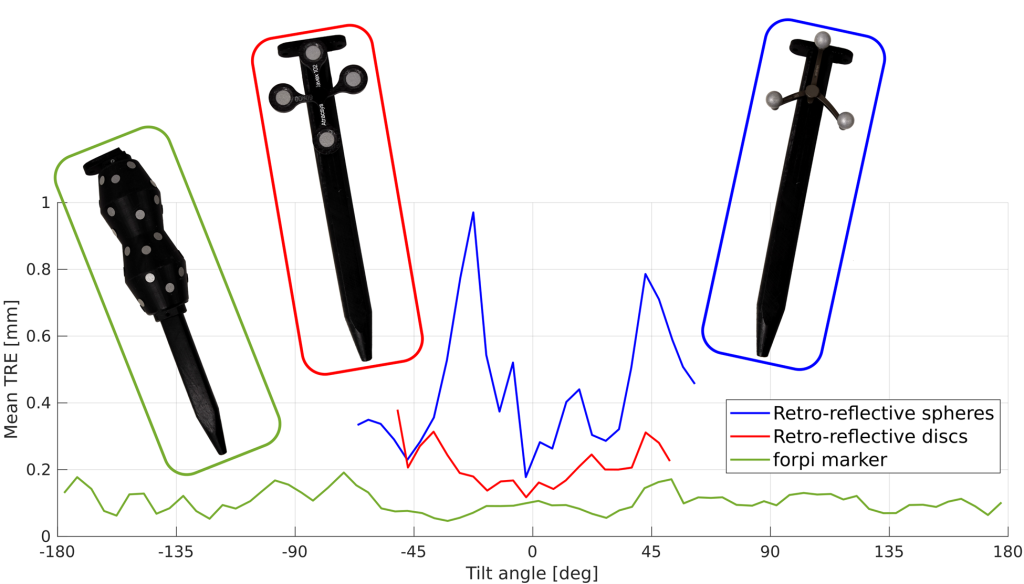
Figure 2: Accuracy comparison between a forpi marker and classical markers made of flat retro-reflective discs and spheres measured with fTk500 at 1.5m distance.
The graph in figure 2 shows the average error as a function of tilt angle with respect to the camera line-of-sight. The flat disc marker provides very accurate measurements at low tilt angles, but the usable tilt range is limited. With reflective spheres, the visibility range is not substantially increased due to attachment-induced obstructions and fiducial overlap; tip localization accuracy is also lower than with discs. Finally, the forpi marker enables 360° detection around the pointer’s shaft axis with no compromise in accuracy.
By distributing fiducials over a 3D geometry, forpi addresses a common limitation of optical tracking in the OR: loss of tracking due to tilt. The result is continuous detection across large rotations without sacrificing accuracy, enabling more flexible system setup and tool design. The forpi is meant for customization: tailor it to your needs and your application!
Check out our forpi™ marker and do not hesitate to contact us!

