fusionTrack™ 250

Discover
EN

Our most trusted low-latency
optical tracking system

Excellence begins with precision.
fusionTrack™ 500 is Atracsys optical tracking system offering ultra-low latency, cutting-edge precision and a very high measurement rate of 335 Hz in large working volume. It excels in demanding robotics applications requiring cutting-edge accuracy, speed and exceptional reliability.

The fusionTrack™ 500 is a real-time optical tracking system that enables passive and active marker tracking with exceptional accuracy.
Equipped with two cameras, it uses advanced triangulation to deliver precise 6DoF pose tracking (x, y, z, α, β, γ) at a true, non-interpolated rate of 335 Hz.

Real-time high-speed of 335 Hz and low latency (4 ms): unlock applications never imagined before
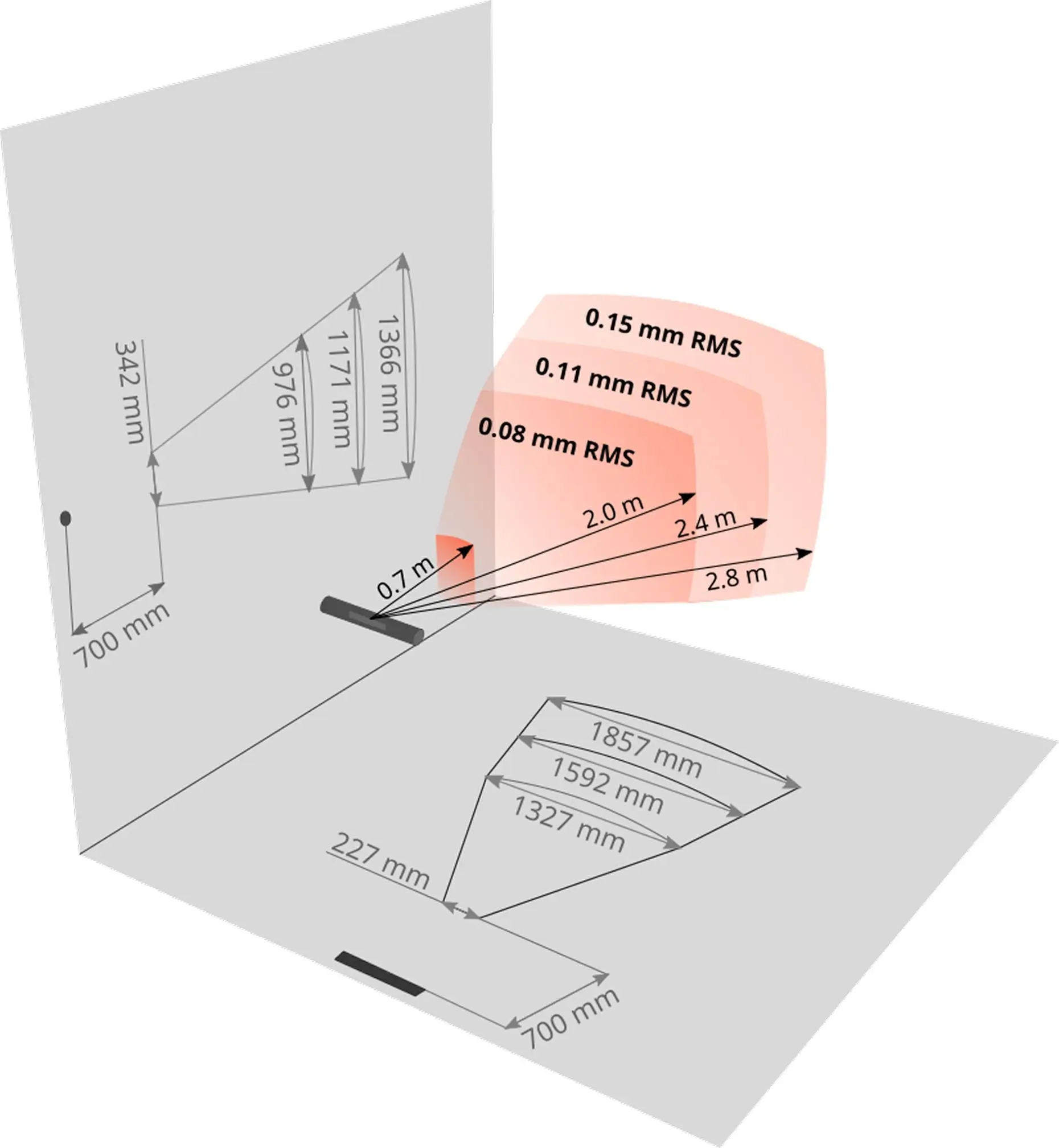
High-precision: 0.08 mm RMS up to 2.0 m
Ethernet connection for both data and power (PoE+)
Supports both active and passive marker technologies
Multi-level fault checking: keep full control with a real-time access to several levels of error information
Atracsys offers a complete ecosystem of solutions, designed to enable higher accuracy and streamline integration: cameras, markers, verification and calibration tools, SDK and a dedicated customer service
Atracsys SDK provide access to data across all processing stages—from raw images and 3D fiducial positions to full marker pose—along with multi-level fault checking for real-time error diagnostics at every step
Tailored evaluations, R&D consultancies and dedicated services to fast-track your development and deployment timeline, step by step
| Size & Weight | 528 mm x 80 mm x 88 mm |
|---|---|
| Accuracy 1 | 0.08 mm RMS up to 2.0 m |
| Working volume | Starts at 700 mm |
| Measurement rate 2 | 335 Hz |
| Latency | ~4 ms |
| Tracking specs |
|
| Certifications |
|
(1) Based on a single fiducial stepped uniformly throughout the measurement volume at 20°C.
(2) Depending on user’s computer, network connection and numbers of blobs detected in the pictures.
(3) Full speed is preserved for 4 markers of 4 fiducials. (i.e. 16 fiducials).
Due to continuous improvements, Atracsys reserves the right to modify the information or specifications without prior notice.