fusionTrack 250

Real-time high-speed 120 Hz and low latency 4 ms
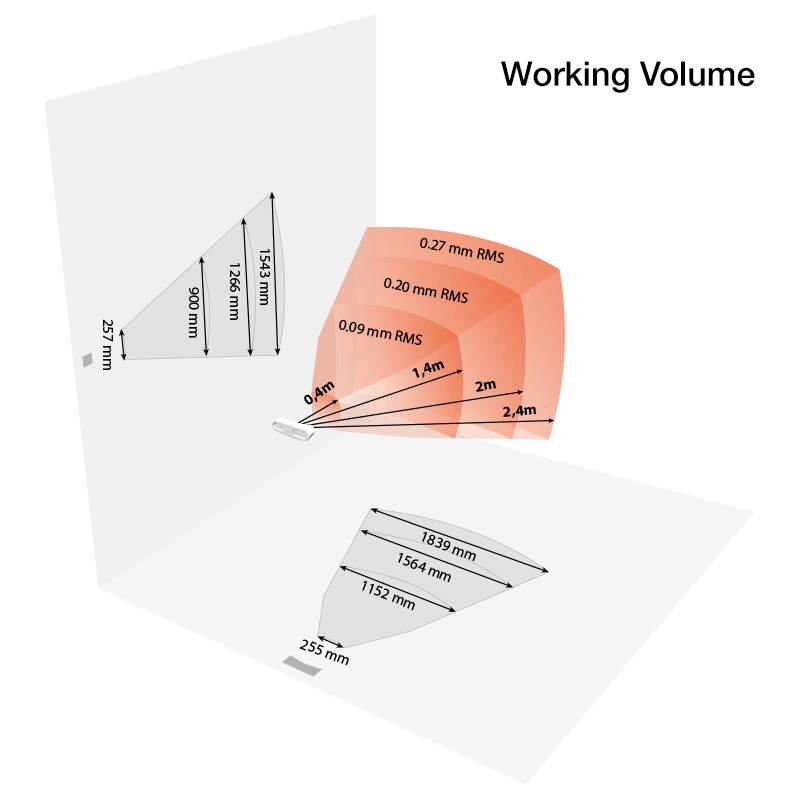
High-precision 90 μm RMS up to 1.4 m
Ethernet connection for both data and power (PoE+)
Open system complete access to images and data
Active and passive markers tracked simultaneously
The fusionTrack 250 is a passive and active, real-time optical pose-tracking system specially designed to detect and track reflective spheres, disks and IR-LEDs in real-time video streams. The fusionTrack is composed of two cameras that observe reflective and/or active fiducials (IR LEDs) simultaneously, and it uses triangulation to calculate their locations with unrivalled precision and with an unparalleled non-interpolated measurement rate of 120 Hz. When several fiducials are affixed to a marker, the system can determine its pose (position and orientation) with 6 degrees of freedom (x,y,z,α,β,γ).
The fusionTrack SDK enables access to data in real-time at different stages of processing, including raw images, individual 3D positions of fiducials (reflective spheres and disks / IR-LEDs) and up to the pose of markers. The SDK also provides multi-level fault checking. It allows access to error information in real-time at any processing stage: fiducial occlusion level, stereo de-calibration, marker registration error and more.
The fusionTrack can be customized to fit your requirements (e.g. precision level, acquisition speed, working volume). Moreover, the system is compatible with existing passive image-guided surgical tools that are widely used in the medical field.
Technical specifications
| Size | 294 mm x 86 mm x 99 mm |
| Weight | 1280 g |
| Accuracy(2) | 0.09 mm RMS up to 1.4m 0.20 mm RMS up to 2.0m 0.27 mm RMS up to 2.4m 0.18 mm 95% CI up to 1.4m 0.40 mm 95% CI up to 2.0m 0.54 mm 95% CI up to 2.4m |
| Tracking volume | Starts at 400 mm |
| Measurement rate | 120 Hz (3) |
| Latency | ~4 ms (4) |
| Hybrid tracking | Reflective spheres / disks, Active wired and wireless | |
| Acquisition | Parallel (all fiducials at the same time). | |
| Resolution | 2.2 Mp | |
| Max. simultaneous markers(1) | Almost unlimited | |
| Max. fiducials per marker | 5 | |
| Interface | Gigabit Ethernet 1000BASE-T (IEEE 802.3ab) | |
| SDK | C (DLL), C++, Python | |
| Operating systems | Windows / Linux | |
| Mounting | 4 x M4 screws | |
| Power requirements | Power over Ethernet (PoE+ IEEE 802.3at-2009 type 2): 48V 0.6A 25.5W | |
| Operating temperature | 15-25°C | |
| Approvals | Electrical safety IEC 60601-1 ed3.1 (2012-08-20) Electromagnetic compatibility IEC 60601-1-2 ed 4.0 (2014) CB-Report available | |
| Hardware requirements | Intel(R) Core(TM) i3-6100U CPU @ 2.30GHz 4 GB DDR3 RAM 50 MB (Windows) 30 MB (Unix/Linux) disc space Window 8.1 (32 and 64 bits supported) Linux (32 and 64 bits supported), gcc 5.4 or clang 3.8 |
(1) 16 max recommended to preserve full speed
(2) Based on a single fiducial stepped more than 2000 points throughout the measurement volume at 20°C.
(3) non-interpolated
(4) 3ms image acquisition + ~1ms processing time & data transmission.
Due to continuous improvements, Atracsys reserves the right to modify the information or specifications without prior notice.